🔳 The 5 perimeters of autonomous vehicles

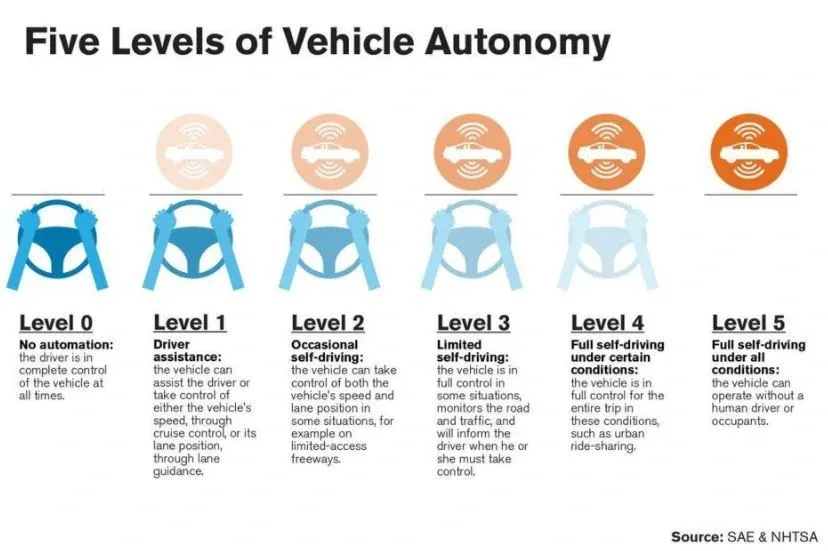
We probably had the famous 5 levels of autonomous vehicles wrong. We often lose track of innovation as a practical and market endeavor, not just a technology benchmark. If up to now, we viewed the progress to full autonomy as a matter of progressively making the driver role disappear, we see that we are hitting rigid walls.
Even with Moore’s law on our side, the diminishing returns of more technology to manage all unexpected road scenarios are felt with renewed acuity. The reasonable market would have been progressive unlocking of autonomous driving, but real markets have humans inside. And the human factor doesn’t help: studies are pouring in on how having a driver with limited responsibilities disengages his / her awareness far too quickly.
Several champions of autonomous vehicles have started to understand that it might be necessary to entirely go through levels 2, 3, and 4 of autonomy. But jumping to level 5 autonomy, where vehicles will operate in all situations without human supervision, is a 2030 gambit at best.
How do we solve this conundrum? It’s relatively simple if you change your perspective.
Autonomous vehicles that we had in 2019 are pretty much driving by themselves at 50km/h in a well-mapped closed perimeter without anything crazy going on around them (bikes and pedestrians are perfectly OK, a few cars and buses manageable) and suitable weather conditions (why do you think the most advanced playgrounds are in California or Arizona?). So if you put enough constraints on the perimeter, we are already at level 5.
As such, the way ahead might not be about increasing driving autonomy in an already open perimeter but instead starting close to fully autonomous driving in a limited perimeter that would be extended progressively.
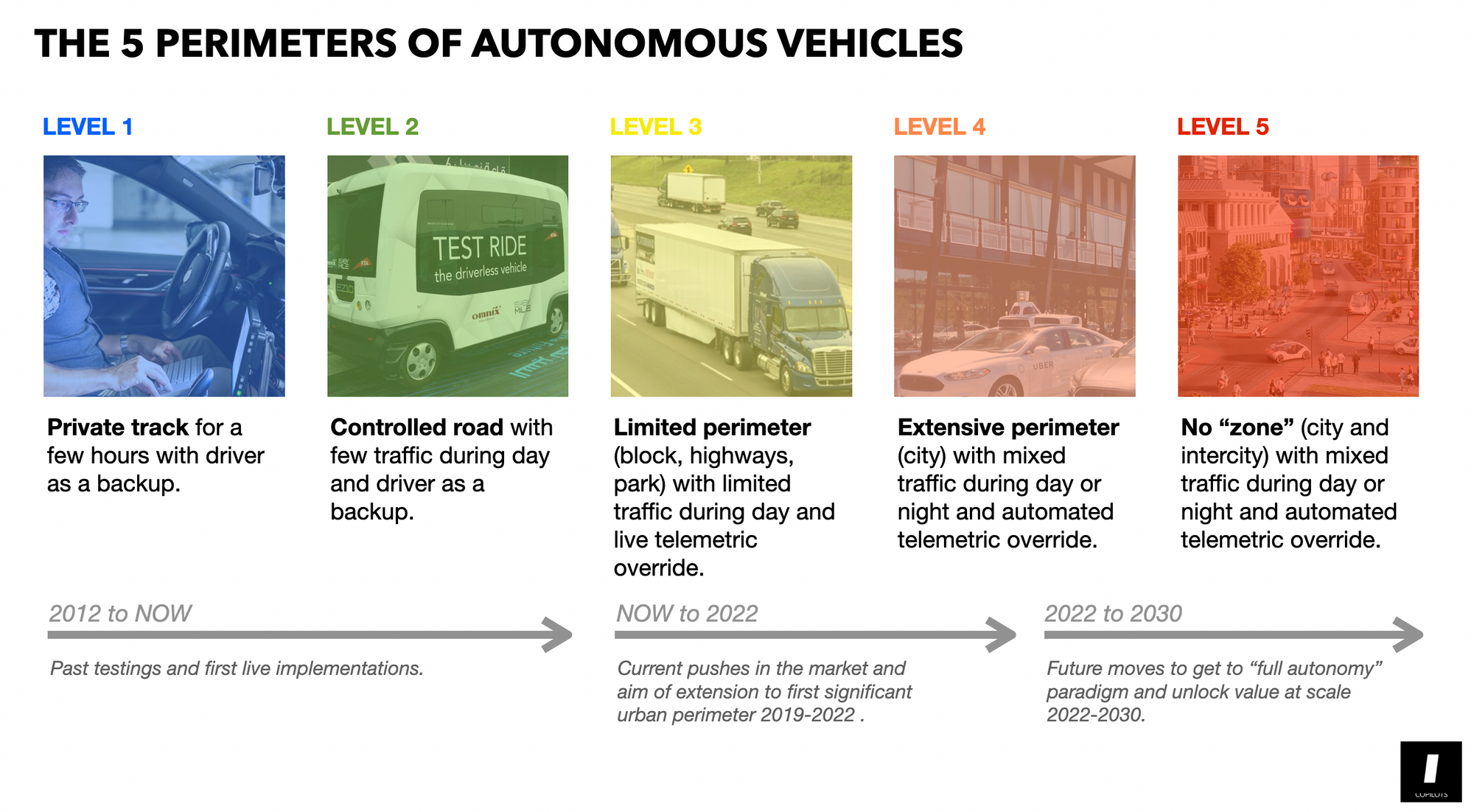
With this mindset, the 5 levels of autonomous vehicles should maybe be updated to the 5 perimeters of autonomous vehicles:
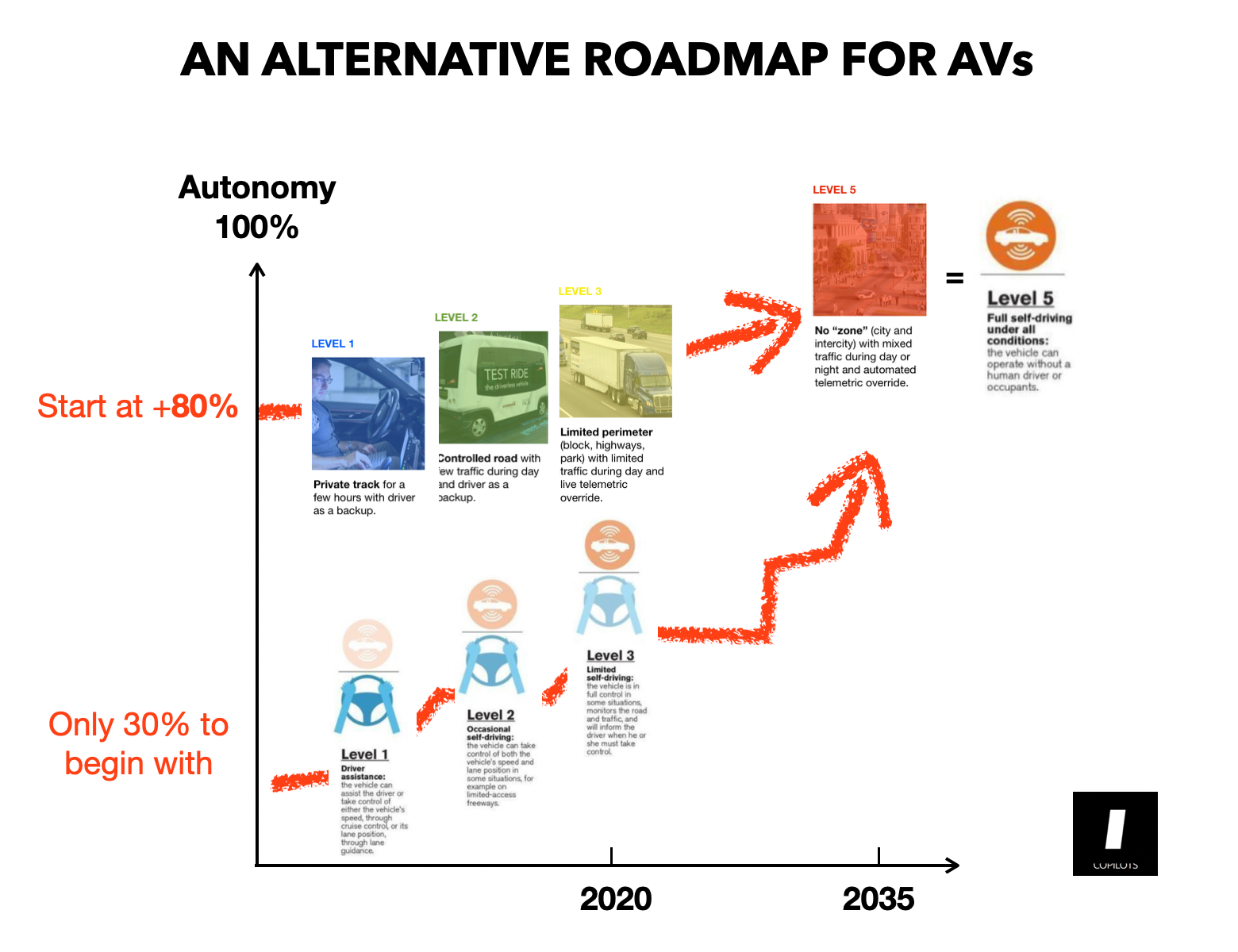
This would lead to a different roadmap (pun intended?) for the autonomous vehicle industry, where full driving autonomy is the starting point, not the end-game:
This strategy would have a key advantage: dealing with Tesla’s drivers lulled in a false sense of security because their cars are very good at self-driving on open roads, but not good enough to sleep in it or watch Netflix instead of the road. If you start with the principle that the driver shouldn’t be active at all to avoid this dangerous misconduct, then you deal with what you can manage: what is the type and size of perimeter your technology can handle right now.
Why aren’t you hearing about this discussion more? Well, it’s still a bit early in the game and the culture around mobility and autonomous vehicles is just starting to change as we speak. More importantly, maybe, the enormous investments made with the previous paradigm in mind, make it difficult to change the narrative.
Why do I share this? Everyone involved in innovation or technology brags about customer-centricity and more than anything else AGILITY. The reality of the market is that agility is not so much about production and engineering, but your mindset. Every innovation breakthrough in the markets is synced to significant mindset changes.
And what I learned years after years, is that your skill at adopting a flexible mindset about your vision, your sunk costs, and generally, the way forward, is what makes you a powerful innovation company, or just a technology peddler.


